Humanoid Robot Interaction Framework
This work investigates the possibilities of human to humanoid interaction with robots whose computational power is limited. The project has been carried out during a year of work at the Computer and Robot Vision Laboratory (VisLab), part of the Institute for Systems and Robotics in Lisbon, Portugal.
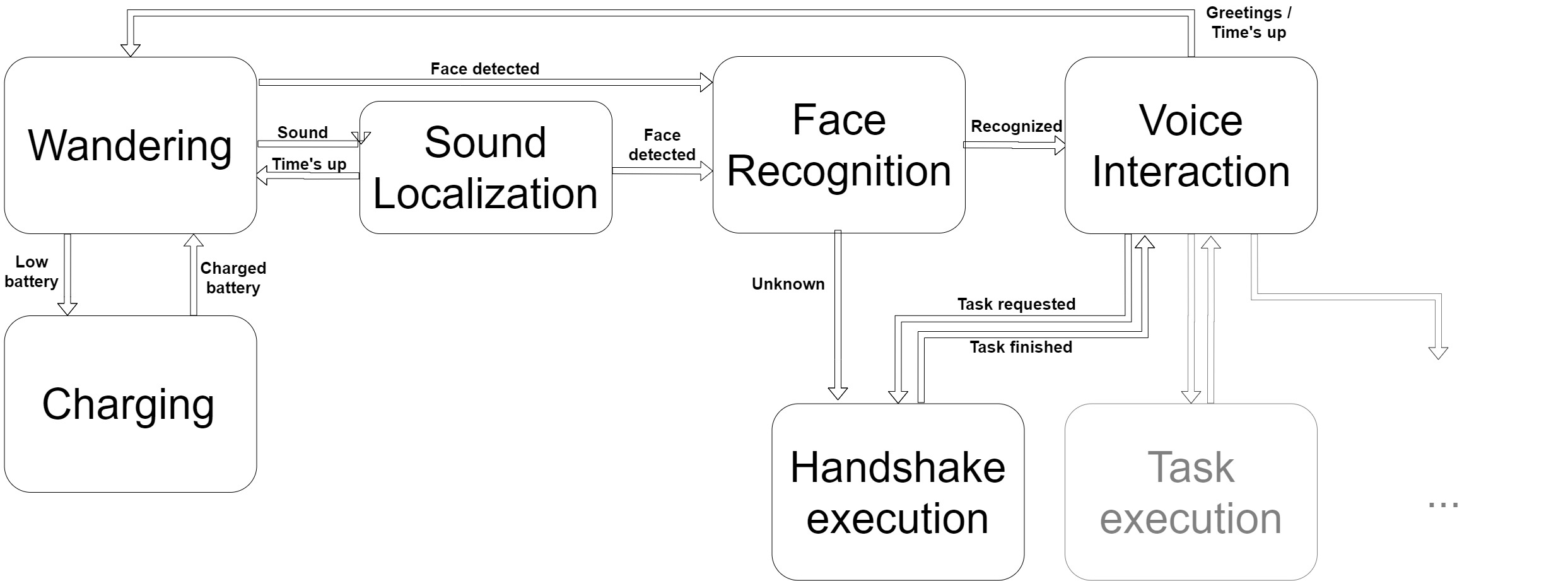
The humanoid robot has to be able to safely wander around a boulding, engage with people/respond to engaing, communicate with them, successfully accomplish a task, go back to charge when low on battery.
Communication, the basis of interaction is the most complicated part, is simultaneously visual, verbal, and gestural. The robot’s algorithm provides users with natural language communication, allowing them to catch and understand the person’s needs and feelings. The design of the system should, consequently, give it the capability to dialogue with people in a way that makes understanding their needs possible.
The whole experience, to be natural, is independent of the GUI and is used just as an auxiliary instrument. Furthermore, the humanoid can communicate with gestures, touch, and visual perceptions and feedback.
This creates a totally new type of interaction where the robot is not just a machine to use but a figure to interact, inquire, and even talk with a social intent.